Kontrol Araştırma Grubu
|
Araştırma Grubu: |
Kontrol Araştırma Grubu |
|
Çalışma Ekibi: |
Prof. Dr. Aydoğan SAVRAN Prof. Dr. Musa ALCI Prof. Dr. Enver TATLICIOĞLU Arş. Gör. Dr. Erman SELİM Dr. Bayram Melih YILMAZ Arş. Gör. Hazin İNCİ Arş. Gör. Fırat BİLGİN Şükrü ÜNVER |
|
Çalışma Konusu Alt Başlıkları: |
Kontrol ve Sistem Mühendisliği Bulanık Kümeler ve Sistemler Robotik ve Mekatronik Sistemler Yapay Zeka, Bilgisayarda Öğrenme ve Örüntü Tanıma Benzetim, Modelleme ve Tanıma |
|
Laboratuvar İmkanları: |
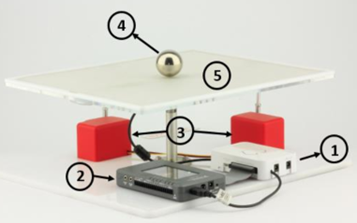
Kontrol Laboratuvarı: Top Dengeleme Sistemi: Bu deney setinde iki boyutlu düz bir tabla üzerindeki topun konumu kontrol edilmeye çalışılmaktadır. Tabla basınca duyarlı sensör ile kaplıdır. Sensör sayesinde topun X-Y koordinat bilgisi elde edilmektedir. Tablaya bağlı, yüksekliği servo motorlar ile kontrol edilebilen iki çubuk, tablanın X ve Y yönündeki eğimlerini değiştirebilmektedir. X-Y eğimleri kontrol edilerek, topun tabla üzerinde bir noktada dengede durması veya belirli bir yörüngeyi takip etmesi sağlanabilmektedir.
Dönel Ters Sarkaç: Tek kontrol girişinin olduğu iki eklemli mekanik bir sistem olan dönel ters sarkaç sisteminde farklı kontrol hedefleri uygulanabilse de ekseriyetle belirlenen hedef sarkacı yukarı yönde tutmaya çalışmaktır.
İki Tanklı Sıvı Seviye Sistemi: Bu sistem, yeterli miktarda sıvı barındırabilen bir hazneden pompa yardımıyla diğer iki tanka sıvı aktarımını sağlamaktadır. Tank1 üstte, Tank2 ise altta konumlandırılmıştır. Her iki tankın da kapasitesi 30cm’dir. Tankın kapasitesi aşılmadan her iki tanktaki sıvı seviyesinin istenilen yüksekliğe getirilmesi hedeflenmektedir.
Top & Çubuk Sistemi: Bu sistem, oluklu bir çubuk üzerinde metal bir topun dengede tutulmasını ve konumunun kontrol edilmesini sağlayan bir sistemdir.
Analog Plant Simülatörü: bilgisayar üzerinde yapılan model benzetimlerini bilgisayar dışına taşıyabilen analog devredir. Analog devreler ile transfer fonksiyonlarının pay ve payda değerleri ayarlanabilmektedir. Bu sistem aracılığıyla transfer fonksiyonu bilinen bir modelin analog olarak yani gerçek zamanlı olarak benzetimi yapılabilmektedir.
Manyetik levitasyon sistemi: Bu deney düzeneğinde metal bir bilyenin manyetik kuvvet altında yukarıya doğru çekilmesi ve havada tutulabilmesi sağlanmaktadır.
|
|
2021 yılında tamamlanmış veya devam eden projeler: |
Robot kollarının görev uzayında denetimi amacıyla model tabanlı denetleyici tasarımı ve insan-robot işbirlikçi uygulamaları, 2021 – 2024, Tubitak 1001, Enver Tatlıcıoğlu. (Yürütücü), Erman Selim (araştırmacı), Şükrü Ünver (bursiyer)
Özet: Proje önerimizde robot kollarının görev uzayındaki hareketlerinin doğrudan denetlenmesini sağlayacak model tabanlı kontrol algoritmaları tasarlanması ve tasarlanan kontrol algoritmalarının insan-robot etkileşimine uygun yapıda geliştirilmesi, hedeflenen hünerli robot kolları üzerinde işbirlikçi uygulama senaryolarında karşılaştırmalı olarak sınanması amaçlanmaktadır. Projemiz, 11. Kalkınma planında ülkemizin gerçekleştirmeyi hedeflediği Milli Teknoloji Hamlesi altındaki kritik teknolojilerden birisi olarak vurgulanan robotik alanındadır. Proje kapsamında araştırma faaliyetlerimizin yoğunlaşacağı işbirlikçi robotik alanı Tübitak tarafından ilan edilmiş olan “Öncelikli Ar-Ge ve Yenilik Konuları 2021” belgesinde Makine İmalat Alanı’nın Robotik ve Mekatronik Sistem Teknolojileri alt başlığı altında vurgulanmış olan İşbirlikçi (Kolaboratif) Robotlar kapsamına girmektedir.
|
|
Top-robot Geliştirilmesi ve İşbirlikçi Uygulama Senaryolarında Kullanılması, 2021 – 2023, Tubitak 1005, Enver Tatlıcıoğlu (Yürütücü), Erman Selim (araştırmacı), Bayram Melih Yılmaz (araştırmacı), Hazin İnci. (bursiyer)
Özet: Proje kapsamında, bir top üzerinde dengesini sağlayarak hedeflenen yörüngeleri takip edebilen robot tasarımı ve kontrolü yapılacaktır. Klasik mobil robotlardan farklı olarak top üzerinde hareket eden bu robotun yer ile teması tek nokta üzerinde olduğundan dolayı daha atik davranabilmektedir. Ek olarak bu robotlardan üç tane üretilip, ortak senaryo işbirliği içinde çalışması sağlanacaktır. |
|
|
Tamamlanmış Lisansüstü Tezleri (son 3 yıl): |
· Derin öğrenme ile yaya-araç tespiti ve mesafe kestirimi, Yazar:Oğuz BAŞOLU Danışman: PROF. DR. MUSA ALCI, Yüksek Lisans, 2022 · Robot kolları için öz ayarlamalı uyarlamalı bulanık mantık tabanlı doğrusal olmayan kontrolör tasarımları, Yazar:Bayram Melih YILMAZ Danışman: PROF. DR. AYDOĞAN SAVRAN, Doktora, 2021 · Telematik verilerine dayalı sürücü sınıflandırma ve uyarı sistemi / Driver classification and alert system based on telematics data Yazar:SİNAN DOĞAN Danışman: PROF. DR. AYDOĞAN SAVRAN, Yüksek Lisans, 2021 · Eksik tahrikli iki bacaklı bir robotun tasarımı ve yürüyüş kontrolünün gerçekleştirilmesi / Design and gait control of an underactuated bipedal robot, Yazar: ERMAN SELİM, Danışman: PROF. DR. MUSA ALCI, Doktora, 2020 · Uyarlanabilir yerel eşikleme ile retina damarlarının bölütlenmesi / Segmentation of retinal vessels by adaptive local thresholding Yazar: SEZGİN YAĞBASAN Danışman: PROF. DR. MUSA ALCI, Yüksek Lisans, 2019 · Ücret toplama araçlarında karekod algılama performansının arttırılması ve gömülü sistem gerçeklenmesi / Improving quick response code detection performance in fare collection tools and embedded system implementation Yazar:BURAK ŞAHAN Danışman: PROF. DR. AYDOĞAN SAVRAN, Yüksek Lisans, 2019 · Bulanık sistemler ile faz dizili radar parametrelerinin gerçek zamanlı ayarlanması / Tuning radar parameters of phased array radar at real time by fuzzy logi̇c Yazar:MUHAMMER ER Danışman: PROF. DR. AYDOĞAN SAVRAN, Yüksek Lisans, 2019 · Çoklu frekans seçimli metal dedektör / Multi-frequency selective metal detector Yazar:BAYCAN AKÇAY Danışman: PROF. DR. AYDOĞAN SAVRAN, Yüksek Lisans, 2019 · Design, development, modeling and control of a Stewart platform / Stewart platformunun tasarımı, geliştirilmesi, modellenmesi ve denetlenmesi Yazar:ALİ BARS GÜNDÜZ Danışman: PROF. DR. ENVER TATLICIOĞLU, Yüksek Lisans, 2020, (IYTE) · Periodic disturbance estimation based robust control of marine vehicles / Deniz araçlarının periyodik bozan etken kestirimli gürbüz denetimi Yazar:DENİZ KURTOĞLU Danışman: PROF. DR. ENVER TATLICIOĞLU , Yüksek Lisans, 2020, (IYTE) · On improving the performance of repetitive learning controllers / Yinelemeli öğrenmeli denetleyicilerin başarımlarının iyileştirilmesi Yazar:NECATİ ÇOBANOĞLU Danışman: PROF. DR. ENVER TATLICIOĞLU, Yüksek Lisans, 2019, (IYTE) |
|
Yayınlar (son 3 yıl): |
Self-Adjusting Fuzzy Logic Based Control of Robot Manipulators in Task Space, Yılmaz B. M. , Tatlıcıoğlu E. , Savran A. , Alcı M., IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS, cilt.69, sa.2, ss.1620-1629, 2022 Variable-time-interval trajectory optimization-based dynamic walking control of bipedal robot, Selim E. , Alcı M. , Altıntas M. Robotica, 2021 Adaptive fuzzy logic with self-tuned membership functions based repetitive learning control of robotic manipulators, YILMAZ B. M. , TATLICIOĞLU E. , SAVRAN A. , ALCI M. APPLIED SOFT COMPUTING, cilt.104, 2021 Generating Z-number by Logistic Regression, Bilgin F. , Alcı M., ISEEE 2021: 2021 IEEE 7th International Symposium on Electrical and Electronics Engineering , Galati, Romanya, 28 Ekim 2021 An Application of Offset-Free Linear Quadratic Optimal Control, İNCİ H. , ALCI M. , SAVRAN A., 4 th International Students Science Congress, İzmir, Türkiye, 18 - 19 Eylül 2020, cilt.1, ss.218-228 Desired model compensation-based position constrained control of robotic manipulators, Gul S., ZERGEROĞLU E., TATLICIOĞLU E. , KILINÇ M. V., ROBOTICA, cilt.40, sa.2, ss.279-293, 2022 Inverse optimal adaptive output feedback control of a class of Euler-Lagrange systems: A nonlinear filter based approach, Aksoy O., ZERGEROĞLU E., TATLICIOĞLU E., PROCEEDINGS OF THE INSTITUTION OF MECHANICAL ENGINEERS PART I-JOURNAL OF SYSTEMS AND CONTROL ENGINEERING, 2022 Human-Robot Interfaces of the NeuRoboScope: A Minimally Invasive Endoscopic Pituitary Tumor Surgery Robotic Assistance System, Dede M. I. C. , Kiper G., Ayav T., Ozdemirel B., Tatlicioglu E. , Hanalioglu S., et al., JOURNAL OF MEDICAL DEVICES-TRANSACTIONS OF THE ASME, cilt.15, sa.1, 2021 A Multi-Priority Controller for Industrial Macro-Micro Manipulation, Uzunoglu E., Tatlicioglu E. , Dede M. I. C., ROBOTICA, cilt.39, sa.2, ss.217-232, 2021 Output tracking control of an aircraft subject to additive state dependent disturbance: an optimal control approach, Tanyer I., TATLICIOĞLU E. , ZERGEROĞLU E., ARCHIVES OF CONTROL SCIENCES, cilt.31, sa.2, ss.267-286, 2021 Periodic disturbance estimation based adaptive robust control of marine vehicles, Kurtoglu D., Bidikli B., TATLICIOĞLU E. , Zergeroglu E., OCEAN ENGINEERING, cilt.219, 2021 A Passivity-based Decomposing Method for Operational Space Control of Kinematical Redundant Tele-operation Systems, Cetin K., TATLICIOĞLU E., CONTROL ENGINEERING AND APPLIED INFORMATICS, cilt.23, sa.1, ss.41-49, 2021 NEURAL NETWORK BASED ROBUST CONTROL OF AN AIRCRAFT, Tanyer I., Tatlicioglu E. , Zergeroglu E., INTERNATIONAL JOURNAL OF ROBOTICS & AUTOMATION, cilt.35, ss.13-22, 2020 |